一、設備主要參數
1.輸入電源:單相三線 AC220V±10%;
2.工(gōng)作環境:溫度-5oC~+40oC;濕度 85%(25oC);海拔<4000m;
3.氣源壓力:0.4~0.6MPa。
4.裝置容量:<1kVA;
5.外形尺寸:1650mm×1200mm×1500mm;
6.安全保護:具有接地、漏電壓、漏電流保護,安全指標符(fú)合國家(jiā)標準(zhǔn)。
二、設備功能結構參(cān)數(shù)
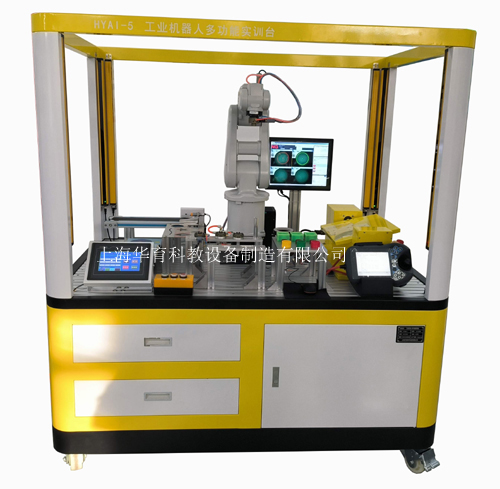
實訓裝置可以各個模塊獨立運行,能實現機器人單機練習實訓,又可以進行聯機運行,組成一套自動化運行係統,完成上料、輸送、搬運(yùn)、壓鑄、碼垛等(děng)流程。
實訓(xùn)裝置為模塊(kuài)化開(kāi)放式設計結構(gòu),不僅可作為獨立的係統單獨(dú)使用,也可以(yǐ)作為子係統與其它類似設備(bèi)組合(hé)。模塊(kuài)之(zhī)間(jiān)可以更換,方便二次開發。
實訓桌用鋁型材(cái)和鋼板焊接組(zǔ)成,桌麵特有的 T 型槽,方便機械部件和電器元件的拆卸安裝,實訓桌的桌腳裝有帶刹車滾輪,便於裝置移動位置。
實訓桌的電氣安(ān)裝板采用改進型“橫二豎六”橢圓長孔(kǒng)加工,整體設計規範(fàn)、合理,使各類元器件在(zài)任何角度、任(rèn)何方位都能輕鬆裝配、調(diào)整。電(diàn)氣安裝板(bǎn)可以向外抽出,方便電路布局和安裝(zhuāng)調試。
實訓裝置擴展性強,所(suǒ)有模塊均可自由安裝和變換,根(gēn)據需要可不斷進行升級(jí),不需花太大代價。

三、設備組成(chéng)及功能參數
六自由度機器人工作站(zhàn)由機器人本體、機器(qì)人控製器、示教盒、組成。機器人本體(tǐ)通過配備多功能氣爪(平(píng)行機械爪、吸盤)完成物件的抓(zhuā)取、放置、軌跡模(mó)擬畫圖、碼垛等操作(zuò)。
1、工業機器(qì)人本體參數
機器人本體由六自由度關節組(zǔ)成,抓取物體重量≤3kg。固定在型材實訓桌上,活動範圍半徑580mm,角度 3302、
2、機器人控製(zhì)器參數(shù)
它的運動控(kòng)製技術、TrueMove和QuickMove是精度、速度、周期時間(jiān)、可編程性以及與外部設備同步性等機器人性能指標的重要保證(zhèng),支持DeviceNet、PROFIBUS DP、PROFINET、EtherNet/IP、Allen-Bradley總線協議,可應用於各(gè)種控製係統中。
3、機器人示教器(qì)參數
彩色、觸摸屏設計(中(zhōng)、英文互換);
三維操縱杆(gǎn)使用簡(jiǎn)易、方便、快捷(jié);
仿Windows操作界麵,會使用電腦的您,同樣能輕易掌握(wò)操作;
和機(jī)器人本體配套,示教盒控製電(diàn)路的主要功能是對操作鍵進行掃描並將按鍵信息送至控製器,同時將控製器產生的各種信息在顯示屏上進行顯示。
4、搬運工作站參數
主要由供料機構、傳輸機構、裝配平台(tái)、暫存盒及工件等組成。
供料機構由井式料倉、料台、方形工件、雙聯氣(qì)缸、檢測傳感器等組成。主要完(wán)成工件的自動上料。
傳輸機構主(zhǔ)要由直流減速電機、工業皮帶、定位傳感器、皮帶滾輪、型材(cái)支架等組成,用於傳輸工件。
裝(zhuāng)配平台即可作為裝配平台,也可以作為碼(mǎ)垛實訓平台(tái),亦(yì)可用做原材(cái)料堆放平台,根據實訓的需要(yào)用於不同的(de)功能。主要由工業型材及鋁材質平台組成(chéng)。
暫存盒主要(yào)由鋁合金材質加工(gōng)而成(chéng),用與工件的暫存。
工件尼龍材質,用於搬運、碼(mǎ)垛、壓鑄訓練。
工作站利用機器人在流水線上拾取工件,將其搬運至容器內。
5、碼垛工作站(zhàn)參數
主要由供料機構、傳輸機(jī)構、碼垛平台(tái)、工件等組成。
供料機構由井式料倉、料台、方形工件、雙聯氣缸、檢測傳感器等組成。主要完成工件的自動上料。
傳輸機構主要由直流減速電機、工業皮帶、定位傳感器、皮帶滾輪、型材支架等(děng)組成,用於傳輸(shū)工件。
碼垛平台即可(kě)作為(wéi)碼垛平台,也可以作為裝配實訓平台,亦可用(yòng)做原材料堆放平台,根據實訓的需(xū)要用於(yú)不同的(de)功(gōng)能。主要由工(gōng)業型材及(jí)鋁(lǚ)合金材(cái)質平(píng)台組成。
工件分采用尼龍材質,用於搬運、碼垛、壓鑄訓(xùn)練。
工作站主要實現模擬紙箱碼垛功能,機器人將模擬紙(zhǐ)箱從傳送線上搬運至碼垛平台,通過對機(jī)器人示教編程,可以進行多組(zǔ)合碼垛排列方式;
6、模擬焊接及軌跡繪製工作站參數
主要由校點錐軸、軌跡模擬(nǐ)板、畫板、支架、畫筆工裝等組成。
工作站模擬焊接方式來實現機器(qì)人的焊接功能;
7、壓鑄工作站(zhàn)參數要(yào)求
主要由模擬壓鑄機和檢測冷卻台組(zǔ)成。
模擬壓鑄機主要由雙軸氣(qì)缸(氣缸行程100mm)、單軸氣(qì)缸(氣缸行程320mm)、磁感應器、電磁閥,導向(xiàng)直線(xiàn)滑(huá)軌組成。實現對工件的模(mó)擬壓鑄成型。
檢測冷卻台主要由檢(jiǎn)測傳感器(qì)、型材支架組成,實現壓鑄件的(de)冷卻和(hé)檢測(cè)。
工作站模擬機器人壓鑄(zhù)取件為例,機器人從壓鑄機將壓鑄完成(chéng)的工件取出進(jìn)行安好性檢(jiǎn)查,然後(hòu)放(fàng)置在平台上進(jìn)行冷卻。
8、打磨拋光工作站參數要求
主要由拋光機構、打磨(mó)拋光工裝等組成。實現機(jī)器人通過與之配套的手爪(zhǎo)實現在該單元的模擬打磨拋光。
被拋(pāo)光工件采用不鏽鋼。固定台主體(tǐ)采用鋁型材製作。
打磨拋光工裝由母體工裝和(hé)打磨拋光工裝組成。通過直流電(diàn)機驅動毛氈拋光(guāng)輪對工件表(biǎo)麵進(jìn)行模擬拋光。
9、工裝工作站參數
主要由型材支(zhī)架、鋁合金支架裝而成,工裝工作站(zhàn)可以容納4種(zhǒng)工裝。工裝包括校點工裝、畫筆工裝、真空吸(xī)盤工裝、打磨拋光工裝。母(mǔ)體工(gōng)裝可以自動抓取其餘的4個(gè)工裝完成相應的動作功(gōng)能,在抓取真空工裝時(shí),氣路能夠自動對接,抓取打磨拋光工裝時,電路(lù)能夠自動對接。
10、電氣控製(zhì)係統參數
電氣控製係統主要由可移(yí)動網孔(kǒng)板、漏電保護器、開關電源、可(kě)編程控製器、按鈕模塊、線槽、電線、接線端子等組成。具有接地保護、斷(duàn)電保護、漏電保護功能,安(ān)全性符合(hé)相(xiàng)關(guān)的國標(biāo)標準。安裝電氣的網孔板采用改(gǎi)進型(xíng)“橫二豎六”橢圓長孔加工,整體設計規範、合理,使各類元(yuán)器件(jiàn)在任何角度(dù)、任何(hé)方位都能輕鬆裝配(pèi)、調整,采用抽屜式設計,可以抽出,方便接線。
11、工業機(jī)器人工作台參(cān)數
工(gōng)作台主體部分采用型材搭建而成,帶有萬向腳輪,方便移動和(hé)固定。單個(gè)工作台外形大體尺寸(cùn)為:1650mm×1200×800mm(L×W×H)。
台麵采用工(gōng)業標準20×80鋁型材,經加固處理,用於安裝工(gōng)業機器人及其他實訓(xùn)模塊。在型材中放置有多種(zhǒng)螺母,各模塊均可自由調(diào)整位置。
工作台下方設置有抽屜式(shì)網(wǎng)孔板,用於安裝電氣控製元件,網孔板采用改進型“橫二豎六”橢(tuǒ)圓長孔加工(gōng),整體設計(jì)規範、合理,使各類元器件在任何角度、任何方位都能輕鬆裝配、調整。
四、實訓項目
1、工業機器人本體工(gōng)作站(含控製櫃(guì)和示教器)
2、工業機器人認知及示教設(shè)計;
3、工業(yè)機器人運動學分析及控製(zhì);
4、運動控製係統及C語言編程控製;
5、工業機器人基本指令操作與位置點(diǎn)設置;
6、工(gōng)業機器人示(shì)教單元使(shǐ)用;
7、基本(běn)編程指令練習;
8、數據傳輸功能實驗;
9、定時、計數、移位(wèi)功能實(shí)驗;
10、比(bǐ)較功能實驗;
11、跳轉功能的應用實驗;
12、子程序調(diào)用功能的應用實驗;
13、中斷控製功能的應用實驗(yàn);
14、PLC程(chéng)序編程與調試;
15、電氣回路的安裝及調試(shì);
16、組態監控軟件的基本應(yīng)用;
17、組態監(jiān)控軟件通信應用;
18、觸摸屏的編(biān)程與應(yīng)用。
19、氣動控製回路的安裝及調(diào)試;
20、電控氣動閥的工(gōng)作原理(lǐ)及應(yīng)用;
21、真空發生器的工作原理及應用;
22、氣源組件的工作(zuò)原(yuán)理及(jí)應用;
23、氣缸的工作原理及應用。
24、搬運工(gōng)作站搬運常用I/O配(pèi)置;
25、掌握程序數據創建;
26、掌握目標點示教;
27掌握搬運程序編寫。
28、掌(zhǎng)握碼垛(duǒ)常(cháng)用(yòng)I/O配置;
29、掌(zhǎng)握中斷程序的運用;
30、掌握準確觸發動作的運用(yòng);
31、掌握碼(mǎ)垛(duǒ)節拍優化技巧。
32、模擬焊接工作站
33、掌握弧焊(hàn)常用I/O配置(zhì);
34、掌握弧焊(hàn)常用參數配置;
35、掌握弧焊軟件設定;
36、掌(zhǎng)握(wò)弧焊程序數據(jù)創建;
37、掌(zhǎng)握弧焊(hàn)程序調試;
38、掌握Torch Services應用。
39、掌握壓鑄取件I/O配置;
40、掌握壓鑄取件常用指(zhǐ)令;
41、掌握WordZone功能;
42、掌握SofdAct功能;
43、掌握壓鑄取件程序編寫與調試
五、設備主要配置參數(shù)要求




 當前位置:
當前位置: 


 上一篇:
上一篇: 返回列表(biǎo)
返回列表(biǎo)


 友情鏈接:
友情鏈接: